
目录
Scipy.optimize是Scipy中一个用于解决数学模型中优化类模型的子包,该子包中又包含了多个子功能模块见下表,不同方法不同条件求解最优化模型。本节介绍minimize对一般规划问题的模型建立与求解。
| 问题类型 | 模块 |
| 多元标量函数的有/无约束最小化 | minimize |
| 最小二乘法最小化 | least_squares |
| 单变量函数最小化器 | minimize_scalar |
| 线性规划 | linprog |
多元标量函数的最小化,是数学规划模型中更为一般的模型,该模块包括有限制性约束和无限制性约束的最小化,而对于限制性约束又分为线性约束和非线性约束。这种更为一般的模型需要针对具体的问题假设选择特定的方法进行求解。
在数学规划模型中,minimize提供的方法能够解决无/有(线性、非线性)约束的多个决策变量目标函数的最优化问题,但是由于该模块是依据函数导数与梯度进行求解,不能够求解整数规划、01规划等问题。
? ? ? ? 对于整个多元标量的最小化问题,主要的api为optimize包下的minimize函数。该minimize函数的完整参数详情如下。同时,对于不同的method方法,函数的参数也会有相应的限制,这在具体的方法介绍中具体介绍。
minimize(fun, x0, args=(), method=None, jac=None, hess=None,
hessp=None, bounds=None, constraints=(), tol=None,
callback=None, options=None)
? ? ? ?该函数主要参数意义解释:
| fun | 待求解的目标函数 |
| x0 | 初始猜测的数组 |
| args | 目标函数带参数时需要指定 |
| method | 选择的方法 |
| jac | jacobian矩阵或梯度函数(梯度求解的方法需要传入) |
| hess | hessian矩阵 |
| hessp | 黑塞向量积 |
| bounds | 寻优范围 |
| constraints | 限制约束 |
| tol | 浮动,可以理解为单次寻找的步长上限,越小精度越高 |
| callback | 回调函数 |
| options | 选项字典,不同方法有不同选项 |
完整的方法options可通过optimize的show_options方法访问
from scipy.optimize import show_options?
print(show_options(method='minimize')
该模块提供求解方法字典如下,? 通过optimize包导入minimize后,对minimize传入method参数指定方法。而对于不同方法的选用,便有不同的求解策略。我们选择部分主要方法介绍。
MINIMIZE_METHODS = ['nelder-mead', 'powell', 'cg', 'bfgs', 'newton-cg',
'l-bfgs-b', 'tnc', 'cobyla', 'slsqp', 'trust-constr',
'dogleg', 'trust-ncg', 'trust-exact', 'trust-krylov']
? ? ? ? 无约束多元标量最小化选择以下4个方法:
? ? ? ? 有约束多元标量最小化选择方法:
? ? ? ? 对于更多的方法可以访问该文档查询:完整方法文档
2.2.1?nelder-mead?
方法完名称为Nelder-Mead Simplex algorithm Nelder-Mead单纯形法,该方法通过对可行域顶点不断迭代选出最优解。由于是迭代寻优策略,可以指定寻优范围。
该方法对应参数:
scipy.optimize.minimize(fun, x0, args=(), method='Nelder-Mead', bounds=None, tol=None, callback=None, options={'func': None, 'maxiter': None, 'maxfev': None, 'disp': False, 'return_all': False, 'initial_simplex': None, 'xatol': 1e-5, 'fatol': 1e-5, 'adaptive': False})
特殊参数:
bounds该方法不要求函数连续,可指定寻优范围
特殊选项:
xatol/fatol解与函数值迭代之间绝对误差上限值,值越小求解越慢,精度越高
2.2.2?powell
方法名称为鲍威尔算法,该方法通过共轭方向加速收敛,其它与单纯形法类似。
该方法对应参数:
scipy.optimize.minimize(fun, x0, args=(), method='Powell', bounds=None, tol=None, callback=None, options={'func': None, 'xtol': 0.0001, 'ftol': 0.0001, 'maxiter': None, 'maxfev': None, 'disp': False, 'direc': None, 'return_all': False})
特殊参数:
bounds该方法不要求函数连续,可指定寻优范围
特殊选项:
xatol/fatol解与函数值迭代之间绝对误差上限值,值越小求解越慢,精度越高
2.2.3?bfgs
方法名称为 BFGS(Broyden-Fletcher-Goldfarb-Shanno algorithm)拟牛顿法。算法利用梯度下降进行收敛,因此不可指定范围。该方法未传入梯度函数时通过第一次的差值估计。
该方法对应参数:
scipy.optimize.minimize(fun, x0, args=(), method='BFGS', jac=None, tol=None, callback=None, options={'gtol': 1e-05, 'norm': inf, 'eps': 1.4901161193847656e-08, 'maxiter': None, 'disp': False, 'return_all': False, 'finite_diff_rel_step': None})
特殊参数:
jac梯度函数
特殊选项:
gtol 梯度范数上限
? ? ? ? norm范数浮动上限
? ? ? ? eps? ? ? ? 求解浮动上限
2.2.4?newton-cg
方法名称为NCG (Newton-Conjugate-Gradient algorithm)牛顿共轭梯度算法,该方法通过梯度函数,二阶导数的hessian矩阵形式将目标函数拟合为二次函数形式,通过该二次式梯度下降求解。
该方法对应参数:
scipy.optimize.minimize(fun, x0, args=(), method='Newton-CG', jac=None, hess=None, hessp=None, tol=None, callback=None, options={'xtol': 1e-05, 'eps': 1. e-08, 'maxiter': None, 'disp': False, 'return_all': False})
特殊参数:
jac梯度函数
hess hessian矩阵
hessp? ? ? ? hessian向量积(与hess只需要定义一个)
特殊选项:
xtol解的平均相对误差上限
? ? ? ? eps? ? ? ? 求解浮动上限
2.2.5?trust-constr
方法名称为Trust-Region Constrained Algorithm信赖域约束算法,?该方法需要用用约束模块定义线性和非线性约束。线性约束与linprog中约束定义类似,而非线性约束需要定义jacobian矩阵和hessian矩阵。
该方法对应参数:
scipy.optimize.minimize(fun, x0, args=(), method='trust-constr', hess=None, hessp=None, bounds=None, constraints=(), tol=None, callback=None, options={'grad': None, 'xtol': 1e-08, 'gtol': 1e-08, 'barrier_tol': 1e-08, 'sparse_jacobian': None, 'maxiter': 1000, 'verbose': 0, 'finite_diff_rel_step': None, 'initial_constr_penalty': 1.0, 'initial_tr_radius': 1.0, 'initial_barrier_parameter': 0.1, 'initial_barrier_tolerance': 0.1, 'factorization_method': None, 'disp': False})
特殊参数:
bounds? 变量定义域
jac梯度函数
hess hessian矩阵
hessp? ? ? ? hessian向量积(与hess只需要定义一个)
? ? ? ? constraints? ? ? ? 线性约束和非线性约束组成的约束列表
特殊选项:
xatol/fatol 解与函数值迭代之间绝对误差上限值,值越小求解越慢,精度越高
3.1.1Rosenbrock函数
? ? ? ? rosenbrock是一个常用于检测优化算法效果的函数Rosenbrock函数_百度百科 (baidu.com)。
该函数可以用以形式表示:
?
其中,X为N为向量表示多元标量
该函数的全局最优解为:
3.1.2 jacobian矩阵和hessian矩阵
? ? ? ? 这两个矩阵是用于梯度求解方法,jacobian矩阵是函数一阶偏导形成的一个向量。hessian矩阵是二阶偏导后得到的一个N阶方阵,当指定X=X0时,在该点的hessian矩阵可表示为:
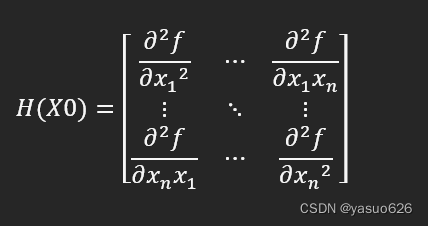
? ? ? ? ?通过这两个矩阵可以将目标函数通过二次函数形式拟合。
对于数学部分了解以上部分即可,具体的数学解释可以参考:黑塞矩阵_百度百科 (baidu.com)
3.2.1无约束多元标量最小化
? ? ? ? 根据上面的介绍,我们以rosenbrock函数作为实例演示(下称rosen函数)。
? ? ? ? 先定义rosen的目标函数,梯度函数和hessian矩阵以及一些假设变量如假定范围为bounds。设定x1,x2两组初始假设值用于比较初始值对求解的影响。
各个方法的实现如下:
3.2.2 有约束的多元标量最小化
? ? ? ? 我们选择二元标量的rosen函数,并添加约束,得到一个优化模型:
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? s.t.
?
? ? ? ? 按照下步骤建立模型并求解,其中线性约束部分与linprog模块类似,通过矩阵表示多个线性约束条件。而非线性约束需要定义对应的约束求解函数cons_f,jacobian矩阵函数和hessian矩阵的线性组合函数cons_J/cons_H.如下所示。两个约束需要通过LinearConstraint和NonlinearConstraint封装为对应的结构,并组合成列表形式作为constraints的参数。
[1] Scipy v1.9.0版用户指南?Optimization (scipy.optimize) — SciPy v1.9.0 Manual
[2] osego 指南?优化与寻根 (scipy.optimize ) — SciPy v1.8.0.dev0+1869.838cfbe Manual (osgeo.cn)
公司名称: 天富娱乐-天富医疗器械销售公司
手 机: 13800000000
电 话: 400-123-4567
邮 箱: admin@youweb.com
地 址: 广东省广州市天河区88号

