
前几天听了林宙辰老师的一个报告,讲的是机器学习中的优化方法【1】,做个笔记。推荐机器学习的人去听听。林老师的主页:
https://zhouchenlin.github.io/机器学习是离不开优化方法的,Pedro Domingos这样概括机器学习和优化方法的关系:
“Machine learning=Representation+Optimization+Evaluation”
后面三项对应于三步:建立模型,求解模型,验证模型。
首先介绍一下机器学习中常见的优化问题
1.分类回归问题
很多的分类回归问题都可以写成问题(1)的一个特例,比如SVM,正则的logistic回归,多层感知器,线性回归,岭回归,Lasso问题等。
2.AdaBoost
通常数据的分类面可能是很复杂的,我们可以通过多个简单的线性分类器组合而成。
3.生成对抗网络
4.AutoML
自动超参数的选取,这是一个双层优化问题。
根据所需要的信息,算法大概分为三种:零阶,一阶、二阶
机器学习中,一阶用的是最广泛的。当然也不排除有零阶和二阶的,这适用于那些具有特殊结构的问题。
1.基本模块:
通常的优化算法主要有以下几个模块,将这些模块以不同的方式组合一下就得到了不同的优化方法。
上面的四个模块在不同的拼接下就形成了很多现有的优化算法。
考虑无约束问题:
假设函数 是光滑的(如果不光滑,我们可以用次梯度,光滑化等)
当目标函数是二次的时候,选出来的方向 是共轭方向。
是
处Hessian矩阵逆的近似,需要满足
,主要有两类近似:秩1和秩2近似。
上面说到的逆牛顿需要存储一个大的矩阵 ,考虑到他是秩1或秩2近似,因此我们可以通过存储一些向量来代替。
考虑可分问题:
其中
光滑,
为非光滑。临近梯度算法对光滑的那部分做二次近似,每一步求解如下问题:
该算法需要假设对于g的proximal operator是容易计算的。
考虑一般问题:
其中
是一个约束集合。
首先走一个梯度步,然后投影回去。
通过罚参数将约束集放到目标函数上,其中 要满足一些条件:连续非负,以及
当且仅当
。该方法依赖于罚参数。
其中需要 是一个紧集(欧氏空间下等价于有界闭集)。方向
的求解相当于对函数
做泰勒一次展开。这个算法适用于稀疏低秩问题,这时候
可能是一个低秩范数球,这时候关于
的求解有很高效的算法。
当约束是线性约束并且可分的时,可以采用ADMM,考虑问题:
对应的增广拉格朗日函数为:
ADMM算法交替的去更新增广拉格朗日函数中的三个变量:
如果对于 还是不好求,我们可以对后面的二次项做线性化,得到线性化的ADMM。
如果问题中的变量可以分为多块,比如:
这种情况下可以采取块坐标下降方法:本质上是交替极小的一个扩展。
考虑如下形式的问题:
找到一个近似的方向 近似梯度,只要满足
即可。有很多的变种,adam,adagrad,adadelta,ada...
通常情况下的加速策略都是利用内插和外推。
后面那一项称为Momentum。
将Nesterov加速应用到了非光滑的可分问题(2)上:
考虑问题:
我们可以用梯度方法: , 如果n太大,每一步的计算量太大,
那么我们就采用最原始的随机梯度方法: ,也就是一次选一个去走。
这两个方法似乎都是一种极端,所以中间存在一种tradeoff。思考如何做到在降低variance的情况下计算量不要增长的太快。下面几个方法就是从这个角度入手。
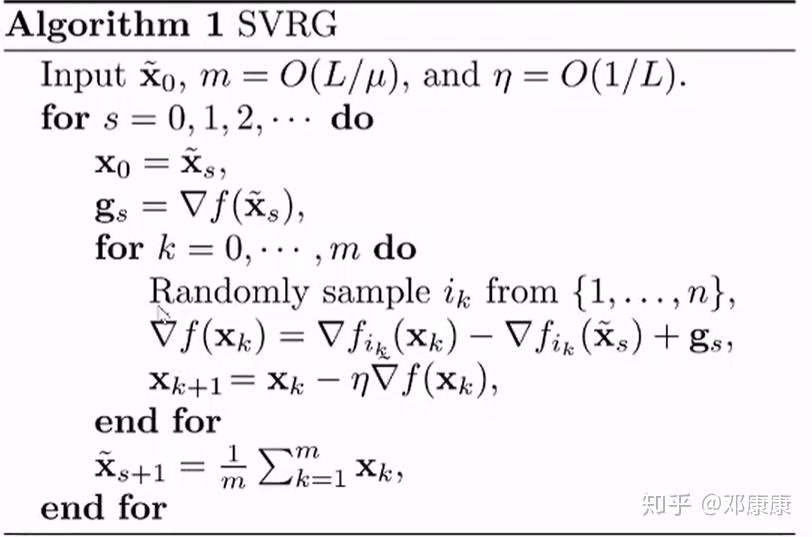
这个方法的思想就是,每隔一段时间算一次完整梯度,用这个信息去矫正每一步的随机梯度方向。
这个方法是Nesterov加速和variance reduction的结合。
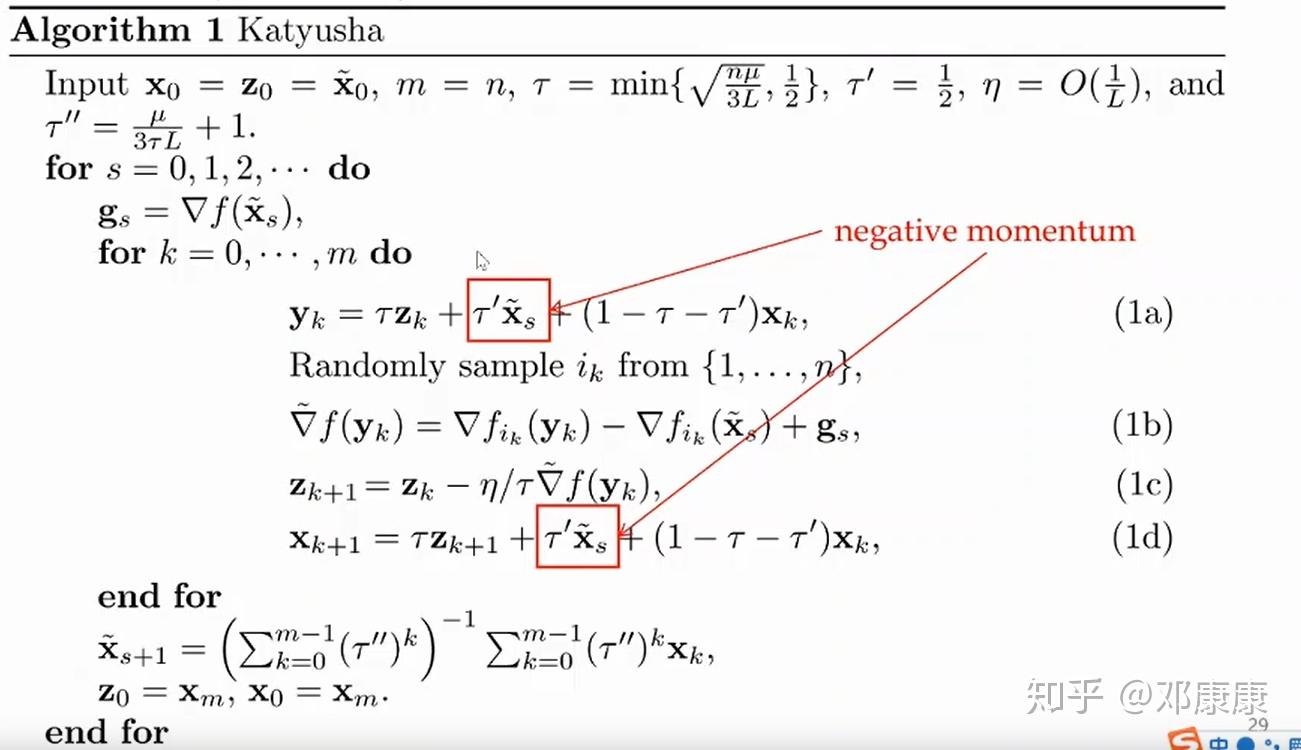
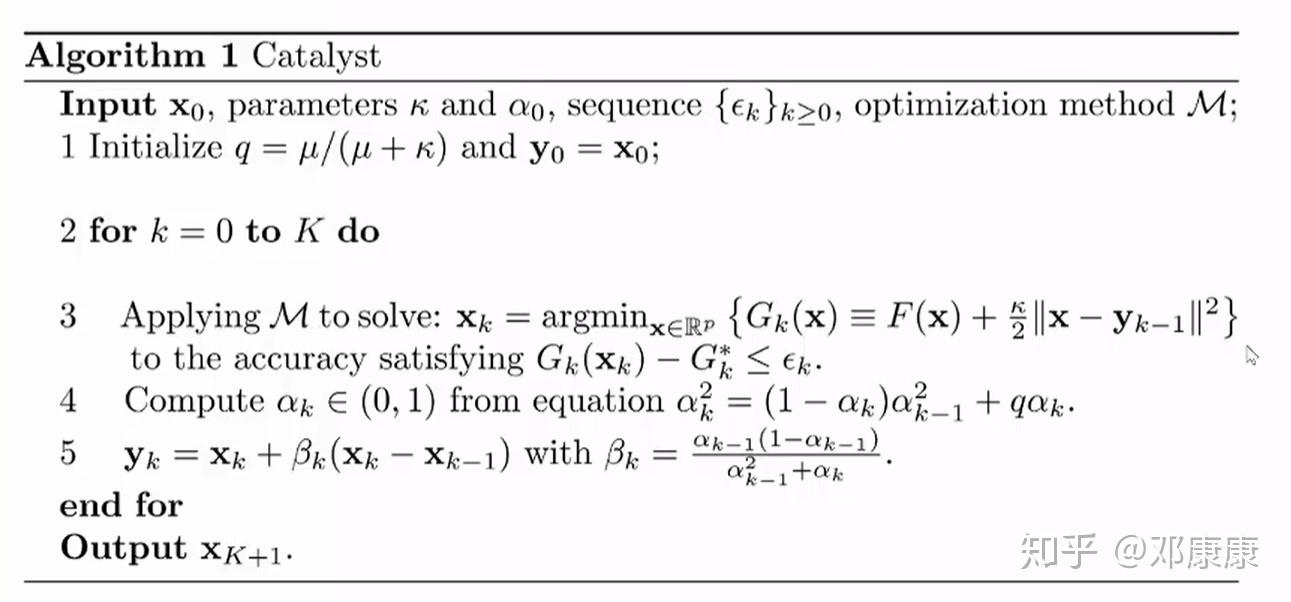
注意到第三步,你可以使用任何一个可以计算的方法去求解第三步中的问题
这个相对于SVRG方差更小。
大规模优化的展望主要有一些这几点
最后林老师推荐了机器学习的人应该学习哪些优化书籍,最后一本林老师自己的。

我的专栏
最优化理论和一阶方法参考文献
公司名称: 天富娱乐-天富医疗器械销售公司
手 机: 13800000000
电 话: 400-123-4567
邮 箱: admin@youweb.com
地 址: 广东省广州市天河区88号

